无轮汽车需要运送人员和物资,最起码有效载荷重量要大于一个人的体重。而且,无轮汽车主要在荒野地域飞行,持续航行时间最好能够保证在4小时以上。
植保无人机已经作为农业机械得到了普及使用。但是,由于电池容量密度的限制,植保无人机的起飞重量难以有效提高,致使植保无人机的有效载荷和持续航行时间都非常有限。若将植保无人机升级为无轮汽车,必须要解决油电混合动力问题,将其起飞重量提高到所需要求。
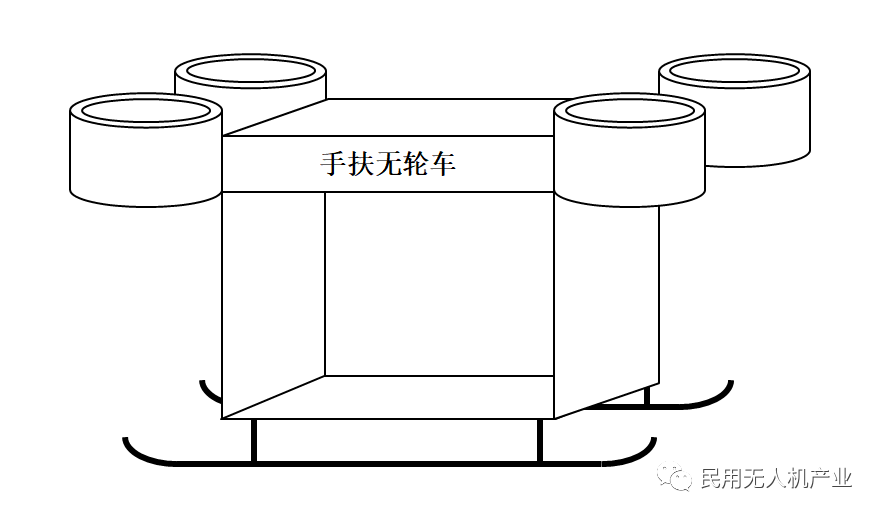
根据现有多旋翼技术,可设定基本的手扶无轮车技术指标要求:
起飞重量:300千克,有效载荷:100千克,乘员:1人,持续航行时间:4小时,飞行高度:10米以下,飞行速度:小于50千米/小时,空机重量:150千克,动力类型:油电混合动力,载油重量:50千克。据此,功率载荷(升功比):5千克/千瓦,燃油发电机组总功率:60千瓦,燃油发电机组功率重量比:1千瓦/千克,燃油能量利用效率:0.4,电动旋翼功率重量比:2千瓦/千克。
对于植保无人机制造企业而言,实现上述手扶无轮车技术指标,难点在于燃油发电机组的研发。目前可采用分布式发电方式,将十几千瓦的双缸二冲程汽油发动机,直接连接发电机发电,然后并联5~6个燃油发电机组网供电。当然,这不是无人机企业的专长,将来有市场需求,发电机制造企业会形成专业化规模化生产供给,以提高性能和降低成本。
手扶无轮车的驾驶方式有:无人手扶驾驶、有人驾驶、无人遥控驾驶等三种模式。
无人手扶驾驶是指手扶无轮车相当于手扶拖拉机,只承担有效载荷的重量和驱动力,驾驶操作由人在无轮车外用手扶持实施。虽然这样效率较低,但这是最安全的一种驾驶方式。比如,在旅游点载客最适合手扶驾驶方式。
有人驾驶是指人在无轮车上驾驶,需要有一定的驾驶技能。这是一般状态下的驾驶方式,可以理解为飞行摩托。
无人遥控驾驶是指驾驶员在无轮车外用遥控方式驾驶,这是现在植保无人机的工作模式。无人遥控驾驶需要一定的通信导航设施保障,在丘陵山区,视线和无线电波受到地形地貌的限制,无人驾驶条件难以保证。所以,无人遥控驾驶只适应有特殊保障的生产作业。比如,用于植保、施肥、播种、航线运输等生产作业。
手扶无轮车要与人员近距离接触,所以一定要将旋翼用外括保护起来,以保障人身安全。如果具有技术能力,将涵道旋翼技术用于手扶无轮车,能够既保证安全,又能提高无轮车的效率。





 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• .jpg) •
• 