民用无人机的概念是伴随着多旋翼无人机的广泛应用而普及的。因此,人们往往将多旋翼和无人机等同起来,以致使无人驾驶技术的一些局限性,附加到了多旋翼技术之上,从而低估了多旋翼技术的作用和意义。
实际上,多旋翼和直升机一样,是旋翼类航空器的一种机型,既可以是无人驾驶,也可以是有人驾驶。
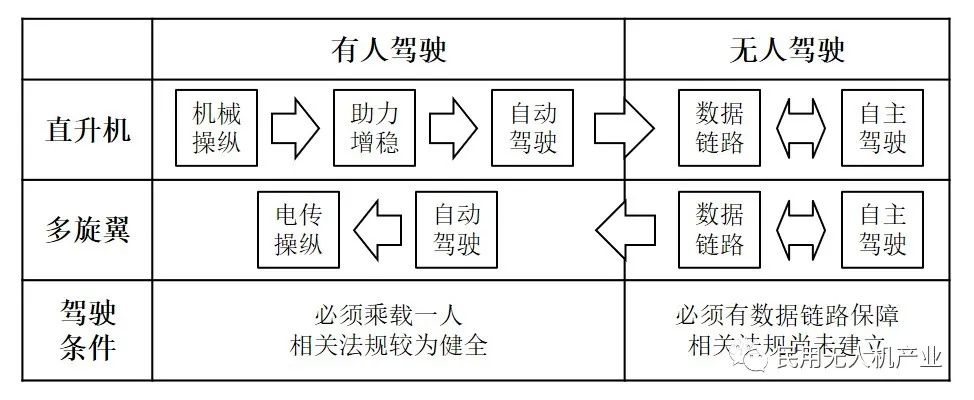
直升机是从有人驾驶发展到无人驾驶的。
早期的直升机采用的是机械式操纵方式,由驾驶员通过操纵总距杆,周期变距杆,脚踏板来控制直升机。
随着航空电子技术的发展,在机械操纵方式的基础上,研制出了助力增稳装置,以辅助驾驶员操作,减轻驾驶员的工作负担。
卫星导航系统的实际应用,使直升机在航行中有了精确的定位和航行目标,自动驾驶成为现实,让驾驶员真正脱离了人工驾驶。可以认为,自动驾驶就是直升机一种无人驾驶的状态,根据需要驾驶员能够在自动驾驶和人工驾驶模式间相互转换,以应付各种复杂的飞行状况。
有人驾驶直升机能够改进为无人驾驶直升机,驾驶员不在直升机内,通过数据链路控制无人机,自主驾驶模式相当于自动驾驶状态,没有人工驾驶模式。遇到不适合自主驾驶状态的情况,只能由遥控端的驾驶员通过数据链路进行处置。
无人机在驾驶上存在着很多限制。首先是完全依赖数据链路。按严格定义来说,无人机只是空中飞行部分,不能独立航行,必须加上数据链路和遥控终端构成无人机系统,才能象有人机一样飞行。其次是无人机存在”感知/避让“的风险。无人机飞控系统不可能具有驾驶员的感知能力和对复杂状况的判决能力。再则是无人机相关法规尚未建立。无人机是新生事物,实际应用时间较短,没有积累大量的飞行数据,运行基础设施没有建立,难以形成相应的法规,现实应用受到法规的很大约束。
与直升机不同,多旋翼是从无人驾驶发展起来的。
多旋翼的设计要早于直升机,但屡屡试验都未获得成功,其最主要的原因就是机械式操纵解决不了飞行稳定性的问题。因此多旋翼在航空历史中沉静了半个多世纪。
随着信息技术的发展,多旋翼采用电子控制技术实现了飞行的稳定操控。电子设备小型化,无刷直流电机等技术的成熟应用,使微小型多旋翼无人机得到普及。当载重量达到能够乘载一名驾驶员时,多旋翼顺理成章地会向有人驾驶方式发展。多旋翼由无人驾驶向有人驾驶改进没有技术障碍,将自主驾驶改进为自动驾驶模式,设置电传操控装置增加人工驾驶模式,即可成为有人驾驶多旋翼,实现不需要数据链路支持的独立航行。
由此可见,多旋翼技术与无人驾驶技术是相互独立的。多旋翼技术并不会,也不应该因为无人驾驶技术的局限性而影响其发展。






 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• .jpg) •
• 