在大尺寸的复杂环境中部署自主无人机的一个障碍包括无人机系统中资源(例如能源、通信、内存和处理能力)方面的容量有限。在这种情况下,基于边缘计算的最新研究成果可以为自主导航提供安全以及节能和资源高效的解决方案。因此,将多架无人机与边缘服务器协作使用可能是应对这些条件带来的挑战的替代方案,从而创建协作导航系统。在这种协同系统中,地图任务分布在无人机和边缘服务器之间,减少了更新地图所需的时间,使自主导航更加健壮。
我们通过边缘服务器构建三维虚拟表示并与无人机共享。每架无人机在飞行过程中使用同步定位和映射(SLAM) 算法构建本地虚拟表示。这种本地虚拟表示被发送到边缘服务器,边缘服务器使用计算机视觉技术来检测环境中的物体,识别它们的位置,将它们与当前虚拟表示中存在的信息进行比较,并在必要时使用无人机获取的信息更新当前的虚拟表示在运动中。这项工作的重点是设计和开发一个框架,能够从无人机产生的本地映射信息中生成动态全局虚拟表示。动态全球地图在边缘设备中计算,然后分布在多个无人机之间。图1概述了目标应用场景。
图1 一台服务器和三架无人机在城市环境中运行的应用场景
此方案中有两种基本类型的设备:UAV和边缘服务器。所提出的框架支持多个无人机和多个服务器,但为简单起见,图1给出了一台服务器和两台无人机。这两架无人机,名称为a和b,是嵌入传感器和摄像头的无人机,提供不同分辨率的红外或RGB图像,旨在执行给定的任务,例如,从源点移动px到目的地py。
在拟议的框架中,最初假设环境是完全未知的。在第一步中,给出了网格形式的离散地图用于路径规划,其中无人机可以分组为网格的所有可能姿势,如图 2 所示。对于路径规划,使用A*算法
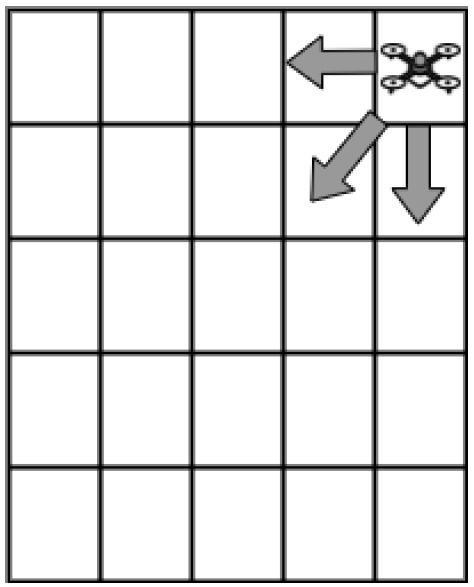
图2 空白导航网格
图3显示了A*算法的输出。起点由字符为“A”的黑色单元格表示,目标由字符为“F”的黑色单元格表示。起点由单元格上方的“A”打开,选择单元格上由“F”表示的最佳元素,以及背景的灰色调。所有邻居都放置在开放的“A”中。在此模型中,具有已知障碍物的位置在制图表达格网中被遮挡。
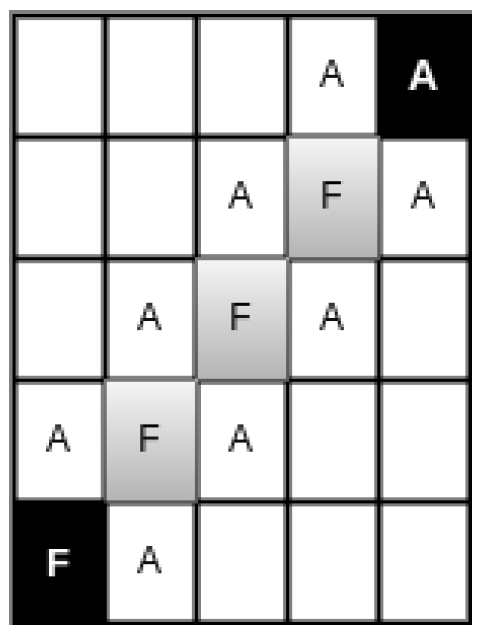
图3 带有路径标记的导航网格
路径生成后,无人机任务开始。首先,从地图生成的路径应该足以成功完成任务。然而,无人机的运行环境是动态的,这使得路径规划过程更加复杂。图4 显示了Gazebo模拟环境的屏幕截图。在这种复杂和真实环境中,无人机必须构建包含其信息的环境表示,例如障碍物、自由区域和其他可能相关的信息(例如,危险区域、物体等)。此表示对应于使用其传感器(如照相机、声纳和激光)获得的数据的本地地图。
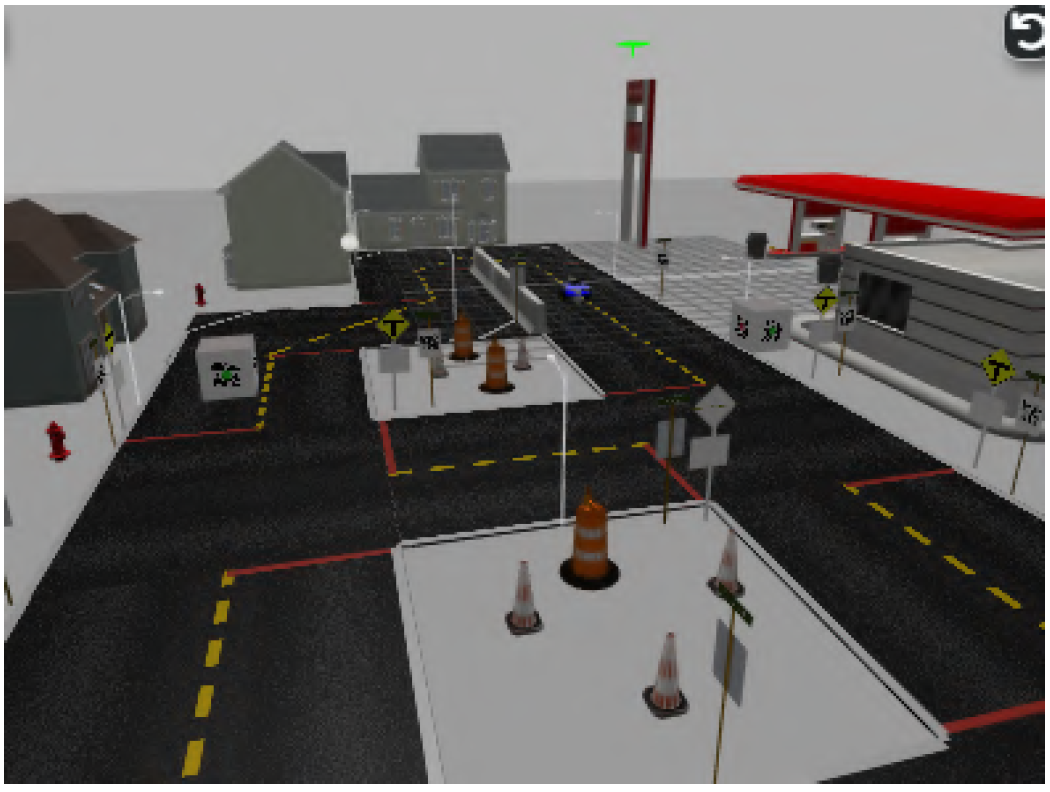
图4 Gazebo模拟环境的屏幕截图
此过程的输出是一个本地映射,如图 5 所示。无人机使用此本地地图避免在路径规划时与全球地图中未知的物体发生碰撞。此外,本地映射通过多跳通信系统发送到边缘服务器。

图5 无人机本地地图视图
在边缘服务器上,接收本地地图时,将启动一个进程,以使用新接收的信息更新全局地图。首先,在接收到的本地映射(帧)上执行卷积神经网络(CNN)。此过程的输出是一个地图,其中包含在接收帧中检测到的对象的标识标签,如图 6 所示。
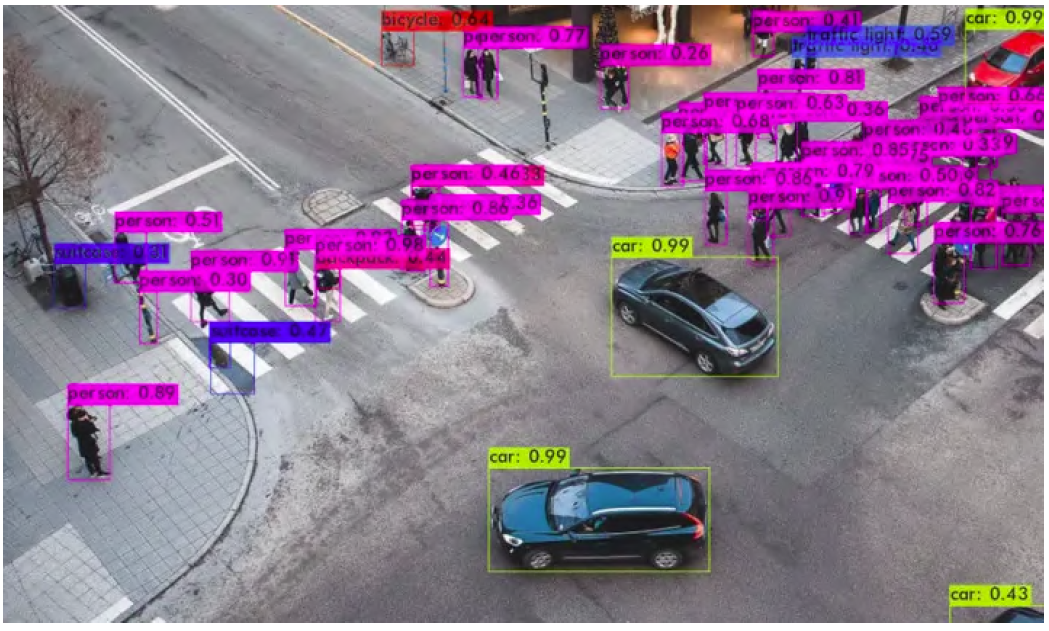
图6 包含检测到对象的本地映射
图7总结了为无人机开发的系统架构的主要组件。对于无人机,建议的框架是使用安装在嵌入式计算机上的机器人操作系统(ROS)和安装在嵌入式计算机的拟议软件中的两个软件模块来实现的。
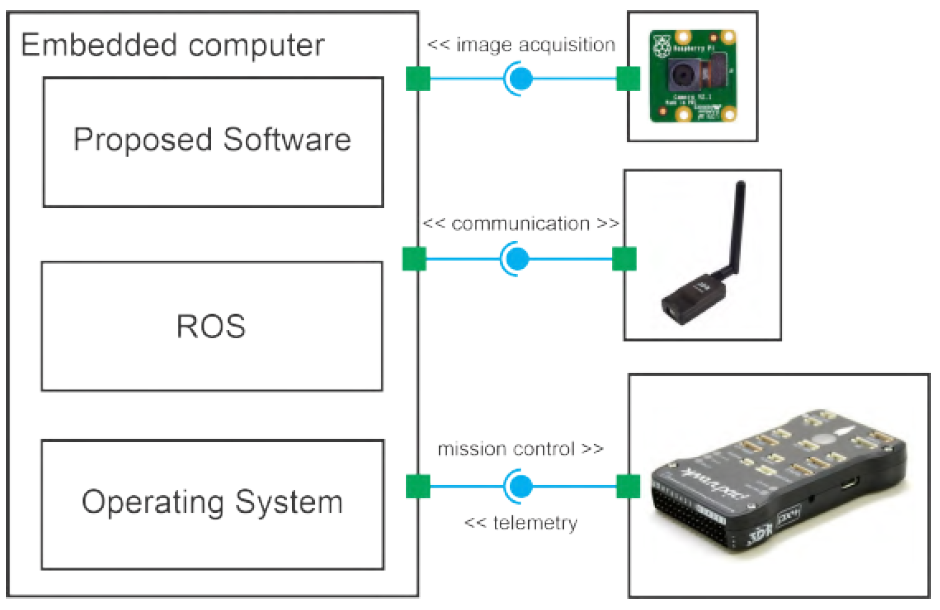
图7 无人机系统架构
在边缘实现服务器,作为示例,图8提供了服务器执行的过程的概述。因此,无人机SLAM生成的本地地图被发送到服务器,服务器开始处理以构建更新的全球地图。在服务器上,本地映射作为输入接收。在该序列中,使用CNN和已训练的YOLO模型检测对象。CNN的输出是包含已识别对象的地图。此时,对象被分类,所有被认为是时间的对象,即不固定的对象,都被排除在地图之外,最后,地图被合并。
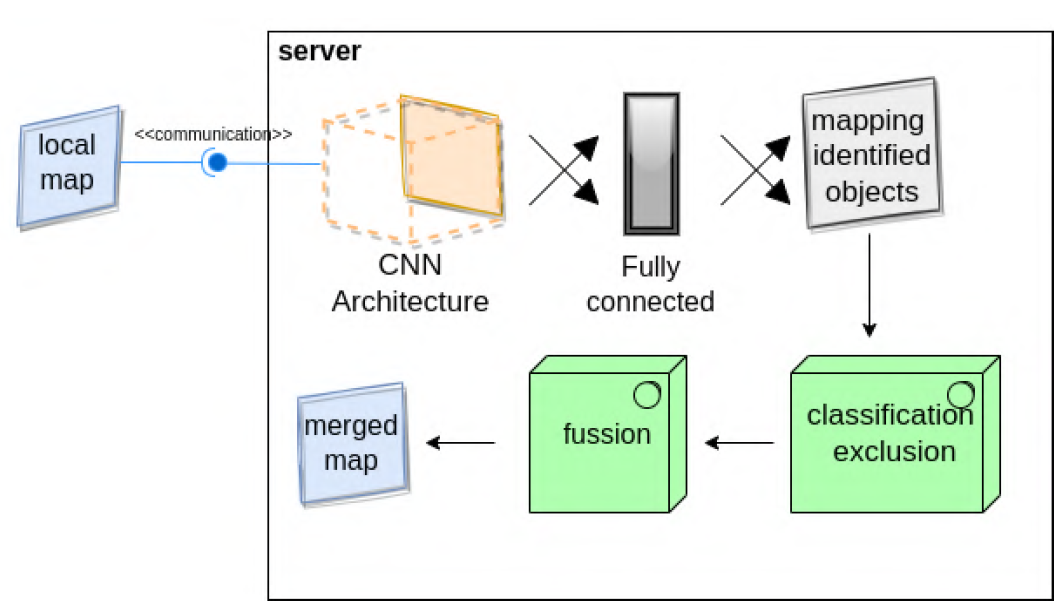
图8 服务器体系结构
现场实验于2022年2月18日在南里奥格兰德联邦大学中心校区停车场进行。图9显示了现场实验的设备和场景。代表要识别和分类的物体的标签被打印在A4纸上,然后粘在木头上,放在地上。对于现场实验,开发了额外的软件层来识别无人机相机映射的标签,并将与标签对应的对象添加到视频中。要将对象添加到视频中,请使用GPS数据。对于服务器和SLAM算法,标签是透明的,因为相应的对象已经存在。

图9 现场实验中使用的设备和场景
图10显示了检测到并分类到先前建立的类别中的对象的百分比。可以看出,CNN结合分类算法的最佳表现是在固定对象(例如房屋,树木,山脉等)中,几乎可以识别95%的对象。
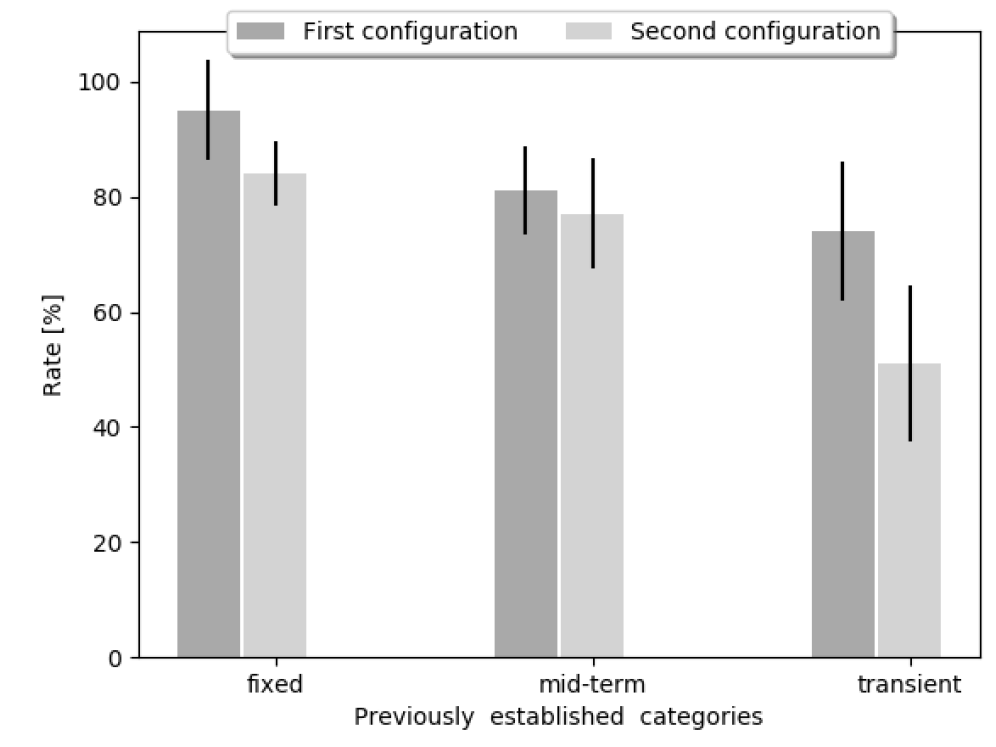
图10 CNN的分类对象
图11显示了检测到并分类到先前建立的类别中的对象的百分比。可以看出,CNN与分类算法相结合的最佳性能是针对固定对象(例如房屋,树木,山脉等),在三个实验中的两个实验中显示出100%的比率。另一方面,对于其中一个实验中瞬态类的物体,效率低于90%。通过仿真和现场实验获得的数据表明,CNN更难识别瞬态物体。一种可能的解释是,经过训练的YOLO模型可能没有足够的数据集来应对所提出的方案。
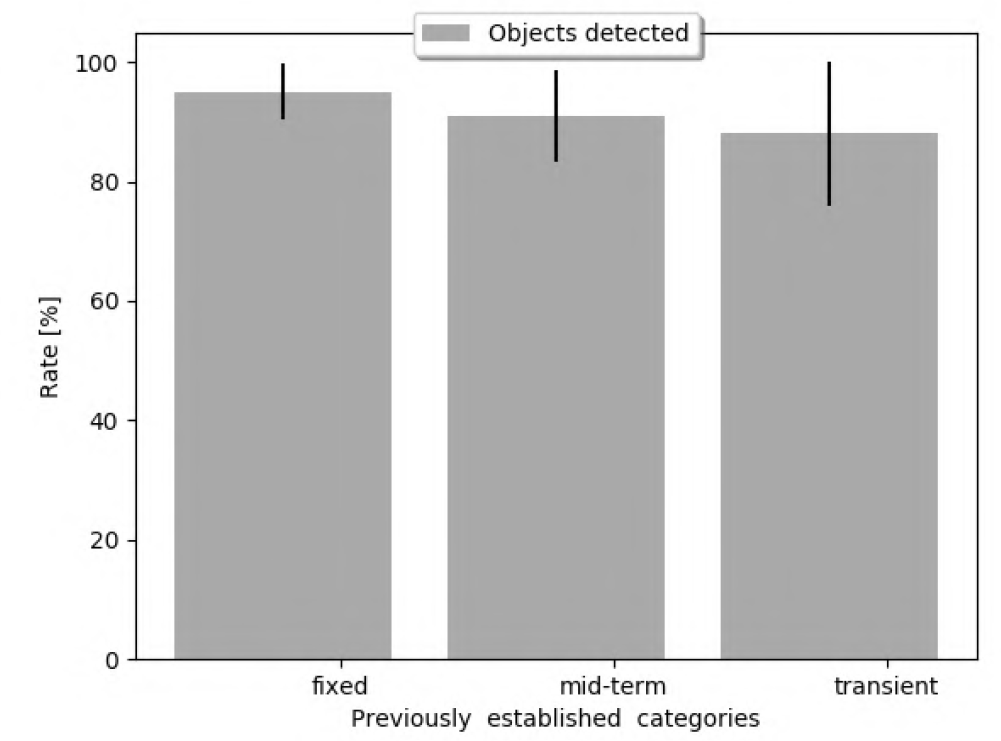
图11 CNN在现场实验中检测到的物体
这项工作证明了高效的图像捕获算法和现代方法可以通过仿真实验生成更接近真实场景的全球地图。表明使用边缘服务器可以减少无人机的限制,并重用其飞行中已经生成的数据,以便在可用时立即动态生成具有在线SLAM更新的地图。






 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 