以无人驾驶航空器为代表的空域新用户,已经形成对传统有人驾驶航空器的一次颠覆性创新,这个孩童般的新生代航空器,如同脚蹬风火轮的哪吒,成为挑战空中交通传统格局的践行者。原有空域运行概念主要针对各种有人驾驶航空器进行设计,无人机的迅速发展对空中交通管理的运行概念、运行规则、基础设施、人员管理等带来了全新的挑战,势必将引发空中交通格局的新一轮变革。大量不同类型的无人机如何加入空域运行体系,如何构建无人机运行概念,我国和欧洲尚未公布明确的实施路径,但美国NASA和FAA已开展大量前瞻性研究,对我国无人机运行管理提供
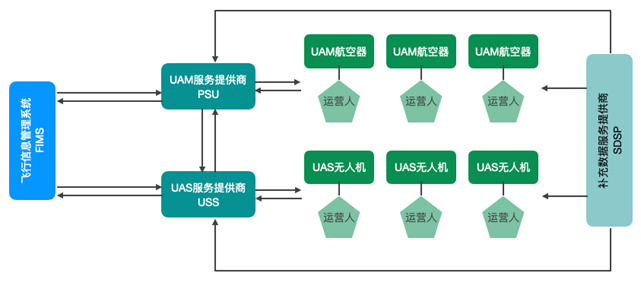
一是,基于空域参与主体分类提出两套并行的运行系统。 从现有的产品特点和运行需求看,迫切需要加入传统空中交通管理体系的新用户主要可分为两类,一类是低空无人机交通管理系统参与者,比如美国联邦航空局FAA提出的无人机空中交通管理(UTM)以及欧洲航空安全局EASA提出的U-space相关方,另一类是城市空中交通管理系统参与者,诸如城市空中交通(UAM)或高级空中交通(AAM)的相关方等。美国针对UTM和UAM相关用户进行了清晰的界定,并依据不同的安全风险等级设计了相应的运行概念、运行规则和运行服务框架,建立了两套独立的无人机运行系统框架。 UTM运行系统中的空域用户可以按照视距内或者视距外两种方式运行。视距内运行的运营人可以目视保持与其他无人机和有人机的安全间隔,在不与其他UTM用户进行数据交换的情况下,无法预先知道其他有人机和无人机的飞行意图,仍可保持运行安全。视距外运行必须依赖无人机的通信、导航/网络、监视(CNS)性能,满足特定的CNS性能要求后才可以开展运行。此类运营人需要借助UTM服务实现运行区域内的信息交互,无人机服务提供商(USS)提供信息交互服务,协助无人机运营人满足UTM运行要求。
UAM运行系统中,由UAM服务提供商(PSU)提供信息交互与协调服务,承担运行管理的绝大部分职责,主要包括飞行计划辅助服务和空中交通管理(ATM)服务,比如通讯、间隔、排序、信息交互,甚至包括实施飞行签派职责等。为保证运行安全,参与UAM运行的航空器、UAM机场、运营人、以及PSU都应达到必要的安全性能等级要求,并通过相关的运行合格审定。比如,对于UAM运营人,应按照民航规章框架体系,完成121或者135部运营人的运行合格审定。
二是,提出“UTM+UAM”隔离运行的空域资源配置方案。
从无人机运行涉及的空域划分看,美国将国家空域体系进行了重新配置,原有A-G类空域中,整体采用分类隔离的运行策略,划设“UTM+UAM”的无人机运行空域范围,避免不同类型无人机的空中冲突可能性。
主流的UTM和UAM运行范围利用运行高度进行了整体隔离运行,对于按照107部运行的轻小型无人机,提出了基于UTM服务框架的运行概念,运行空域限定在400ft以下的高度范围。对于UAM运行服务框架下的无人机,主要运行空域都在400ft以上,除非在起降场地周围才会延伸到400ft以下直至地面的高度范围,起降场地的确定也建议尽量选在400ft以上的区域,比如楼顶等。实际运行时,绝大部分UAM航班的巡航高度设定为1500ft到4000ft的空域范围内。
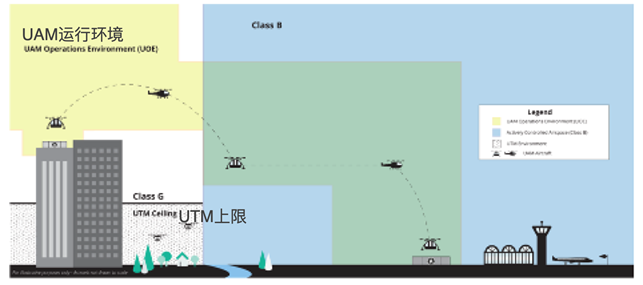
图1 美国UTM和UAM的主要参与主体
三是,构建“UTM+UAM”两个相对独立的运行概念。 美国的无人机整体运行概念可拆分为UTM和UAM两套相对独立的系统,UTM整体运行风险不高,采用相对宽松的安全监管策略和较低的技术要求,FAA对于UAM的安全监管整体向传统有人驾驶航空器进行对标,参照传统民航运行的安全风险水平设计对应的监管方式、基础设施、技术要求等内容。
在FAA 的UTM运行概念中,对按107部运行的运营人仅需进行无人机注册登记,并获取远程身份信息(RID)及空域进入许可,也可以进入部分管制空域内。有人机运营人无需强制性加入UTM,但是FAA鼓励这些有人机运营人通过加入UTM服务来增强空域用户情景意识,提升运行安全水平。FAA将这些自愿加入的有人机用户分为两个层级:被动加入和主动加入。被动加入的运营人从USS获取附近的无人机飞行意图等信息,但是不向无人机运营人发布自己的飞行意图。主动加入的运营人通过USS网络向加入UTM的无人机运营人发布自身飞行意图,甚至可以通过ADS-B和RID等能力发布更多的信息。考虑到无人机空域运行安全与CNS性能具有较强的相关性,UTM中运行的无人机需要相应的性能授权(Performance Authorization)。考虑到无人机机型差异和运行特点差别较大,USS根据无人机CNS性能差异提供不同的服务。CNS性能要求可以是运营商特定安全产品,也可以由USS根据自身运营服务效率进行灵活决定。
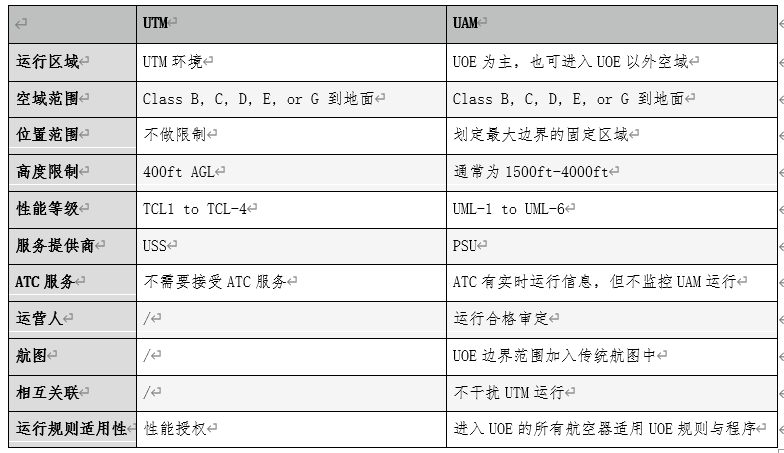
表1 UTM和UAM运行概念的关键要素对比
美国的UAM运行概念中,运行涉及的每个UAM运行环境(UOE)区域都设有固定的空域容量上限,但空域当前是否可用,是基于流量需求、临时飞行限制、非UAM用户需求等,UOE是否可用,或者部分可用是相当灵活的,可以随时被修改。典型运行场景中,随着风向的变化,或者高峰时段的到来,每天修改几次空域可用性是很正常的操作。对于进入UOE空域的所有航空器,都必须遵循UOE运行规则和运行程序。从运行主体看,一个特定区域的UAM大体采用一个运营商,尤其是在高密度航线运行时,仅允许单个运营商在对应UOE区域内运行。为确保UAM与传统民航运行可以无缝衔接,当UAM航空器从UOE进入ATC管制空域时,必须满足该类空域对有人机的航空器性能和最低设备要求,且UAM航空器在飞行前应提交飞行计划,这个飞行计划与有人机的飞行计划完全一致,并且需要获得FAA的批准后方可实施。
近年来,我国无人机行业迎来了快速发展期,产业规模持续扩张,未来,在不降低运行安全水平的前提下,如何保证大型飞机、通用航空器、无人机等多种类型的航空器能够高效顺畅的运行,如何激发各类无人机的商业化应用,需要及早开展运行概念等一系列无人机运行解决方案的基础性研究。美国“UTM+UAM”这种分类隔离运行的管理思路,为我国无人机运行概念构建带来三个方面的启示。 一是,低空空域管理改革需要为无人机预留更多发展空间。 空中交通管理的基本原则是力争使空中交通管理涉及的所有成员都能从中受益,无人机的大规模应用已初现端倪,低空空域资源配置应结合无人机的特点和应用场景进行针对性的设计。 从无人机运营人和用户的角度看,应保障无人机平等使用空域的权利,这种平等性应体现在空域使用的高效性、快捷性、便利性、灵活性、自主性等多个方面。比如,如果轻小型无人机用户在申请飞行计划时,如果仍需遵照传统运输和通用航空的飞行计划审批流程,用户有很大的可能性会放弃这种飞行意愿。只有对不同类型的航空器,充分考虑成本、效率、安全等方面的因素,设置与运行场景相匹配的运行管理流程,提供与用户需求相适应的及时有用决策支持信息,为无人机的冲突管理方案给予更大的自主决策权,才能实现无人机在国家空域系统中享有真正的平等,在适当的安全框架内产生更大的商业价值和产业发展空间。 从管理者的角度看,为保证空中交通管理系统的整体安全,应重点关注系统安全的可靠性,以及系统安全是否易于监控和衡量,结合无人机与生俱来的数字化属性,利用实时数据、系统趋势、预测数据等,建立一系列自动化的安全决策或安全决策辅助工具,促进数据驱动的安全管理体系的形成。 为保证空域运行的安全水平,我国低空空域的组织应结合无人机特点建立隔离运行的使用原则,优化空域结构,尽可能满足无人机用户的空域使用需求。美国通过高度范围对轻小型无人机、UAM航空器、运输飞机等类型的航空器实施隔离运行,轻小型无人机的运行在400ft以下,UAM航空器的巡航高度在1500-4000ft之间,运输飞机的巡航高度普遍在20000ft以上。从我国的相关规章制定趋势看,轻型无人机的适飞空域在真高120米以下,但未对UAM航空器明确巡航高度范围,可参考美国经验,将450-1200米作为UAM的航路高度范围。考虑到这个高度范围内,通用航空器与UAM无人机的运行高度有重叠,UAM运行区域可设置为固定范围,且在低空航图上进行明确标记。对进入UAM运行区域的其他类型航空器,应具备接入UAM运行信息服务系统的能力,且满足该区域UAM的性能要求,尤其是CNS性能。为保证UAM运行安全,应对固定区域内的UAM运营商数量进行限定,一般来说,单个运行区域内应避免两个运营人同时运行。按照国际民航组织ICAO对运行概念的描述,ATM运行概念包含七个主要模块,分别是空域组织与管理、起降场运行、空域需求与容量、交通同步、空域用户运行、冲突管理,以及空中交通相关服务。运行概念从全局的角度描述各组成部分和他们之间的相互依存关系。从无人机产品特点和应用场景发展趋势看,轻小型无人机和UAM航空器很难统一到一个运行概念框架下,应设计两套相对独立的运行概念,分别定义两套运行概念的组成要素和性能要求等内容,实现安全、高效、经济的无人机运行管理。 与传统ATM运行概念相比,运行概念中的起降场运行模块的系统复杂度明显降低,即使是UAM航空器,考虑到UAM运行和起降场运行一般会由同一个运营人实施,无人机运行概念中无需单独描述该模块,可将涉及起降场运行的内容纳入到空域用户运行中。 在空域需求与容量模块中,由于无人机的机型多,性能差异显著,没有了驾驶员的参与,空域运行安全与效率难以通过人的活动进行即时干预,这就对航空器和运行环境提出更严格的性能要求,因此,无人机运行概念中的空域容量模块应注重建立空域容量与性能要求之间的关联关系。 UAM航空器运行涉及的交通同步与冲突管理的职责应由运营人实施,两个模块是充分融合的,重点解决如果制定安全、有序、高效的空中交通流量策略问题。在无人机运行概念构建中,应强化通过自动化和智能化支持工具在交通同步和冲突管理中的作用,系统性的通过动态规划航空器四维航迹控制和商定无冲突航迹,这种动态规划对运行系统整体的即时性、准确性、可靠性都提出了更高的要求,需要相应的设施设备和技术标准与之相匹配。 因此,我国无人机运行概念可从空域组织与管理、空域用户运行、空域容量与性能要求、交通同步与冲突管理四个主要模块入手,对空域使用和空中交通进行一体化、动态管理,实现安全、经济、高效的目标。
注:原文发表于《无人机》2021年13期





 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• .jpg) •
• 